实验室机器视觉方向研究成果在RAL在线发表
《LVIO-Fusion:Tightly-Coupled LiDAR-Visual-Inertial Odometry and Mapping in Degenerate Environments》
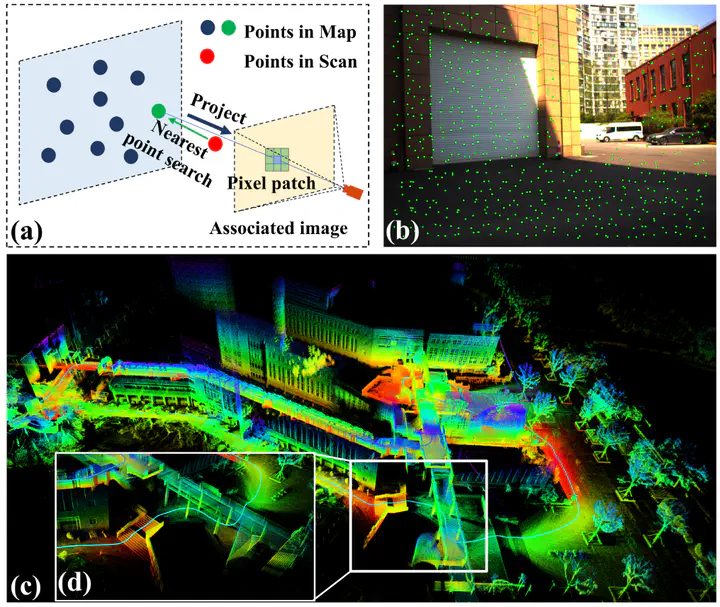
博士生章弘凯在《IEEE Robotics and Automation Letters》期刊发表论文,题目为《LVIO-Fusion:Tightly-Coupled LiDAR-Visual-Inertial Odometry and Mapping in Degenerate Environments》。文章提出了一种创新的、紧密耦合的激光雷达-视觉-惯性里程计与地图方法,称为LVIO-Fusion,可在几何退化以及纹理缺失场景实现稳健而精确的定位与建图。LVIO-Fusion将LIO子系统的点云地图直接投影到图像中以构建光流匹配,在更深层次上耦合激光雷达和相机测量。